z 摘录自小纸屑 https://zhuanlan.zhihu.com/p/148738276
1. 简介
FPN结构,特征金字塔网络,主要用作不同尺度的特征融合,从而提高目标检测算法的精度。
常见的物体检测算法,其实可以分解为三个递进的阶段:
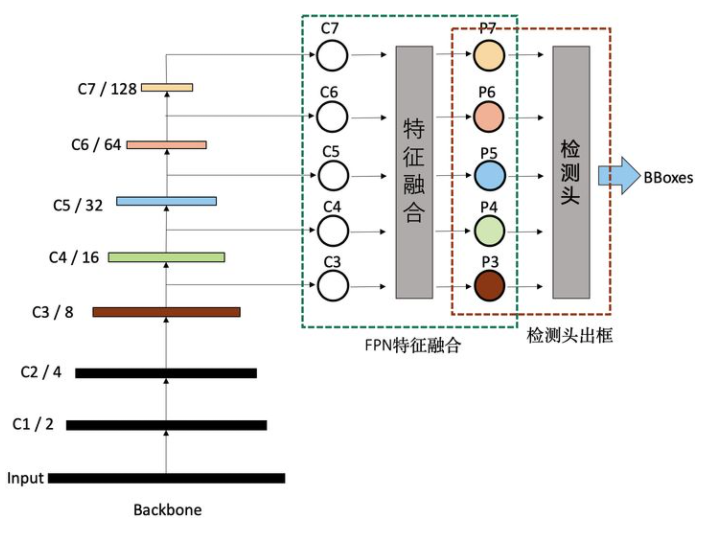
Backbone特征提取阶段
Backbone生成的特征,一般按stage划分,分别记作C1、C2、C3、C4、C5、C6、C7等,其中的数字与stage的编号相同,代表的是分辨率减半的次数,如C2代表stage2输出的特征图,分辨率为输入图片的1/4,C5代表,stage5输出的特征图,分辨率为输入图片的1/32。
Neck特征融合阶段
FPN一般将上一步生成的不同分辨率特征作为输入,输出经过融合后的特征。输出的特征一般以P作为编号标记。如FPN的输入是,C2、C3、C4、C5、C6,经过融合后,输出为P2、P3、P4、P5、P6。这个过程可以用数学公式表达:

Head检测阶段
FPN输出融合后的特征后,就可以输入到检测头做具体的物体检测。
2. FPN及其变种结构
物体检测性能提升,一般主要通过数据增强、改进Backbone、改进FPN、改进检测头、改进loss、改进后处理等6个常用手段。其中FPN自从被提出来,先后迭代了不少版本。大致迭代路径如下图:
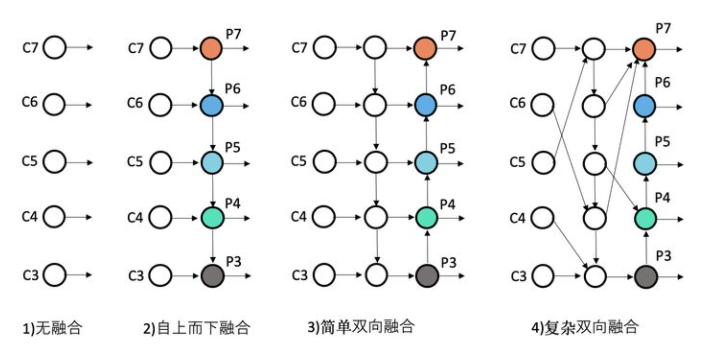
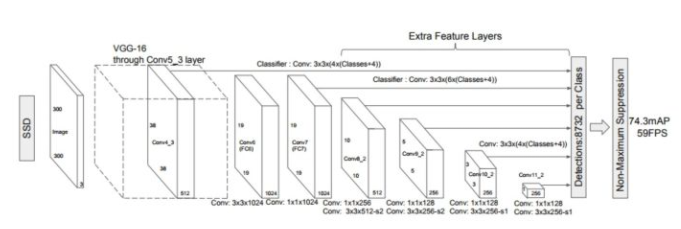
- 无融合
无融合,又利用多尺度特征的典型代表SSD,它直接利用不同stage的特征图分别负责不同scale大小物体的检测。
自上而下单向融合
自上而下单向融合的FPN,事实上仍然是当前物体检测模型的主流融合模式。如我们常见的Faster RCNN、Mask RCNN、Yolov3、RetinaNet、Cascade RCNN等,具体各个FPN的内部细节如下图。
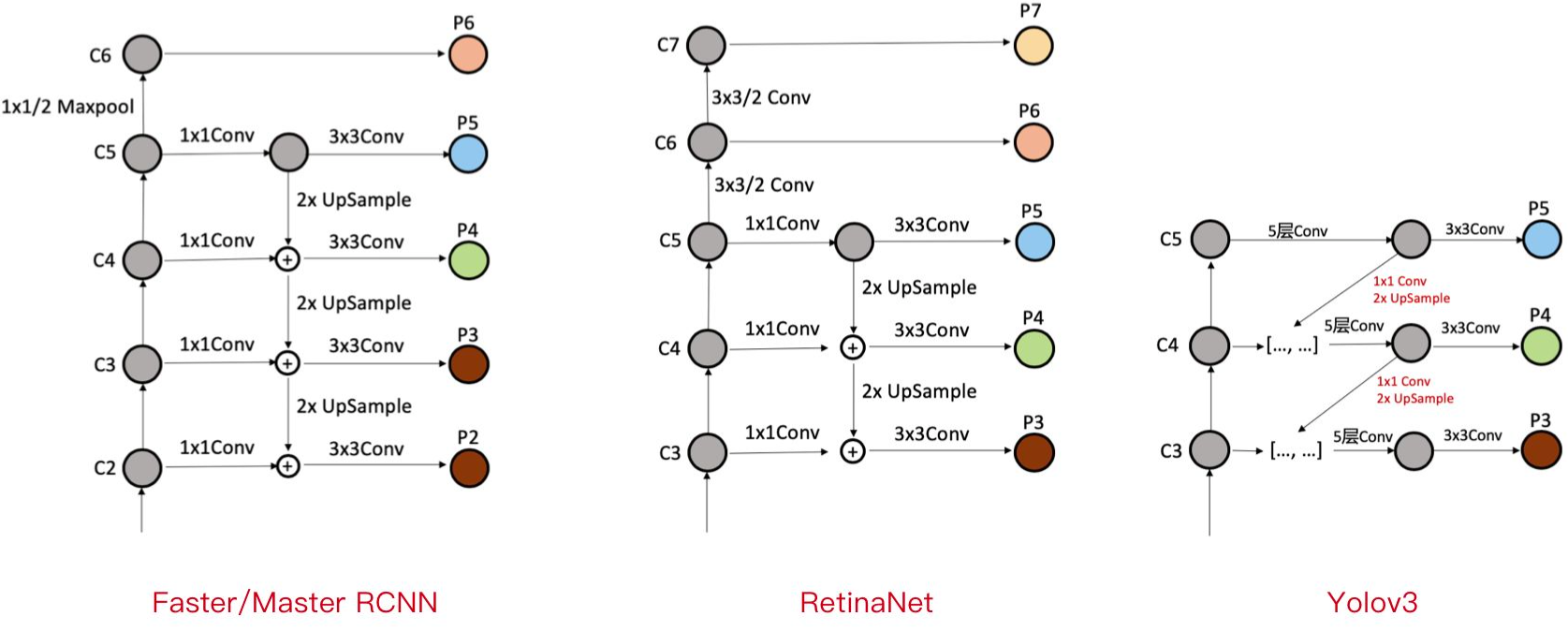
a)Faster/Master/Cascade RCNN中的FPN
Faster/Master/Cascade RCNN中的FPN,利用了C2-C6五个stage的特征,其中C6是从C5直接施加1x1/2的MaxPooling操作得到。FPN融合后得到P2-P6,其中P6直接等于C6,P5是先经过1x1Conv,再经过3x3Conv得到,P2-P4均是先经过1x1Conv,再融合上一层2xUpsample的特征,再经过3x3Conv得到。具体过程可以看上图。
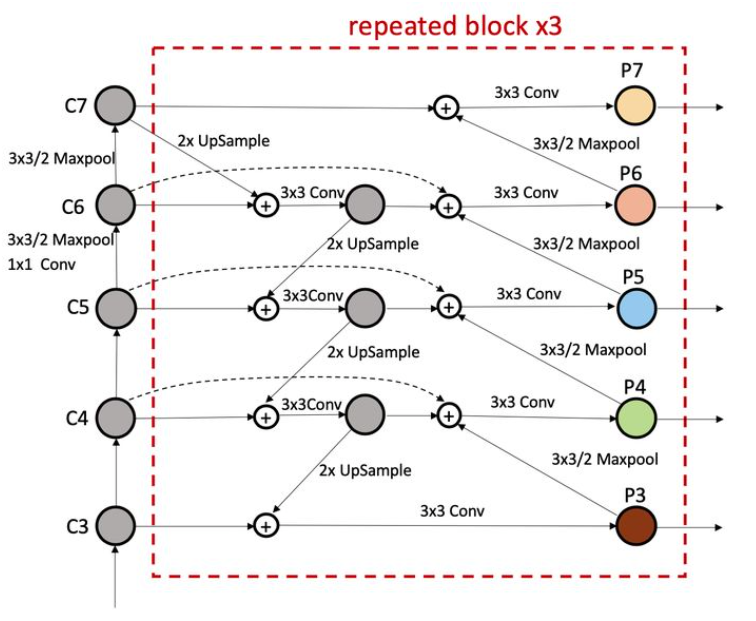
b)RetinaNet中的FPN
RetinaNet中的FPN,利用了C3-C7五个stage的特征,其中C6是从C5直接施加3x3/2的Conv操作得到,C7是从C6直接施加3x3/2的Conv操作得到。FPN融合后得到P3-P7,其中P6、P7直接等于C6、C7,P5是先经过1x1Conv,再经过3x3Conv得到,P3-P4均是先经过1x1Conv,再融合上一层2xUpsample的特征,再经过3x3Conv得到。具体过程可以看上图。
可以看出,RetinaNet基本与Faster/Master/Cascade RCNN中的FPN一脉相承。只是利用的stage的特征略有差别,Faster/Master/Cascade RCNN利用了高分辨率低语义的C2,RetinaNet利用了更低分辨率更高语义的C7。其他都是细微的差别。
c)Yolov3中的FPN
Yolov3中的FPN与上述两个有比较大的区别。首先,Yolov3中的FPN只利用到了C3-C5三个stage的特征;其次,从C5征到P5特征,会先经过5层Conv,然后再经过一层3x3Conv;最后,C3-C4到P3-P4特征,上一层特征会先经过1x1Conv+2xUpsample,然后先与本层特征concatenate,再经过5层Conv,之后经过一层3x3Conv。
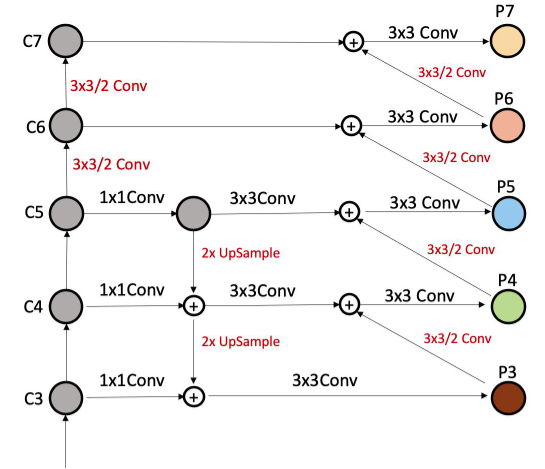
- 简单双向融合
FPN自从提出来以后,均是只有从上向下的融合,PANet是第一个提出从下向上二次融合的模型,并且PANet就是在Faster/Master/Cascade RCNN中的FPN的基础上,简单增了从下而上的融合路径。看下图。
- 复杂的双向融合
PANet的提出证明了双向融合的有效性,而PANet的双向融合较为简单,因此不少文章在FPN的方向上更进一步,尝试了更复杂的双向融合,如ASFF、NAS-FPN和BiFPN。
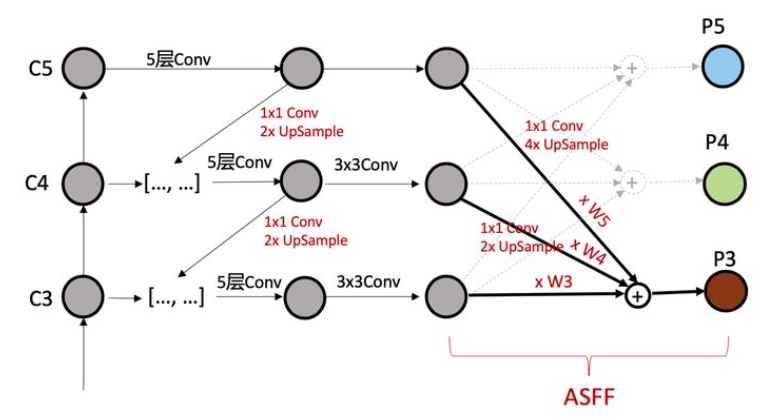
ASFF
ASFF(论文:Learning Spatial Fusion for Single-Shot Object Detection)作者在YOLOV3的FPN的基础上,研究了每一个stage再次融合三个stage特征的效果。如下图。其中不同stage特征的融合,采用了注意力机制,这样就可以控制其他stage对本stage特征的贡献度。
NAS-FPN和BiFPN
NAS-FPN和BiFPN,都是google出品,思路也一脉相承,都是在FPN中寻找一个有效的block,然后重复叠加,这样就可以弹性的控制FPN的大小。
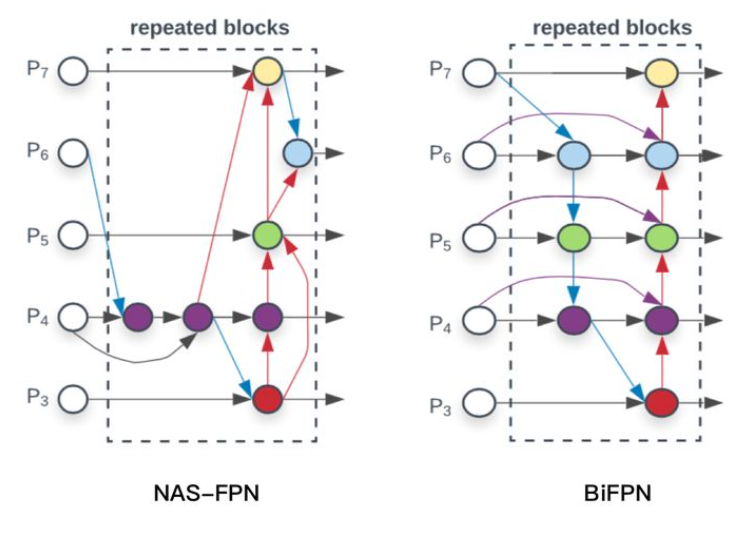
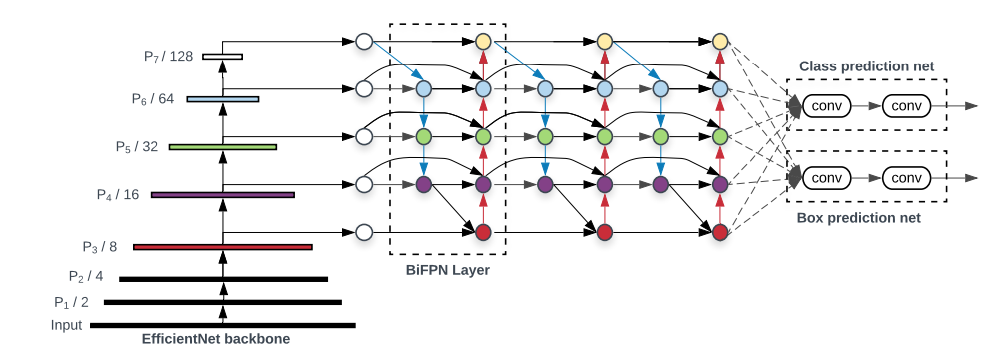
其中BiFPN的具体细节如下图。
改进点1,删除入度为1的节点,如果一个节点只有一个输入边且没有特征融合,那么它将对旨在融合不同特征的特征网络贡献较小。
改进点2,添加跳跃连接。如果原始输入和输出节点处于同一level,则在原始输入和输出节点之间添加一条额外的边,以便在不增加成本的情况下融合更多特征。
改进点3,将BiFPN视作一个基本单元,重复堆叠。不像PANet那样只有一个top-down和bottom-up路径,BiFPN将一对路径视为一个特征层,然后重复多次以得到更多高层特征融合。
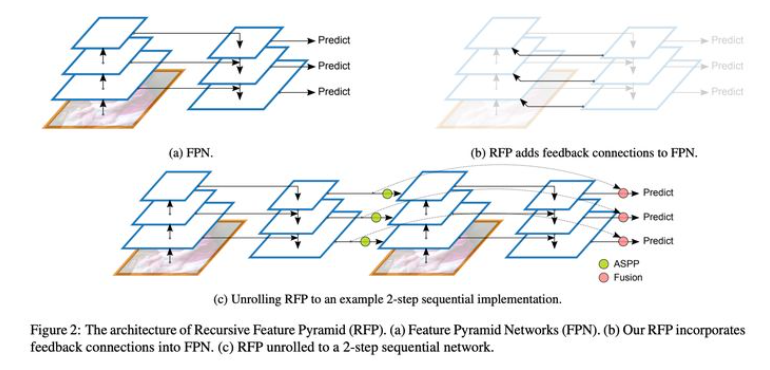
Recursive-FPN
Paper: DetectoRS: Detecting Objects with Recursive Feature Pyramid and Switchable Atrous Convolution
递归FPN理解起来很容易,就是将传统FPN的融合后的输出,再输入给Backbone,进行二次循环,如下图。
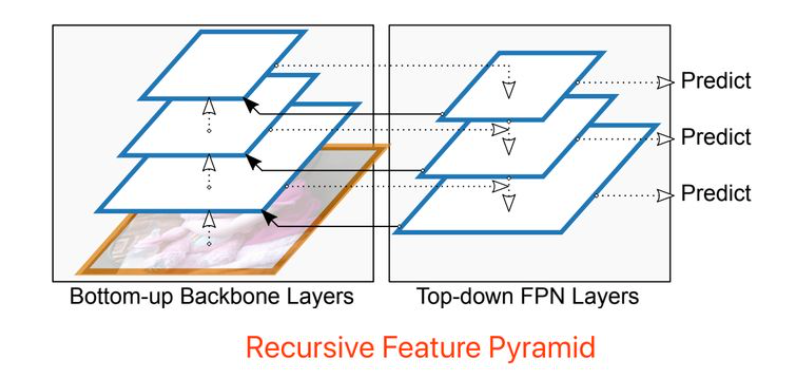
下图给出了FPN与Recursive-FPN的区别,并且把一个2层的递归FPN展开了,非常简单明了,不做过多介绍。